Downscaled Lunar Rover
January 2024 - April 2024
Overview
The Canadian Space Agency is developing a lunar rover called the PEEKbot, designed to explore the Moon's surface and test how 3D-printed composite materials like PEEK perform in space. Our job? Build a small-scale prototype to improve how the real PEEKbot traverses lunar slopes and handles loose, dusty terrain.
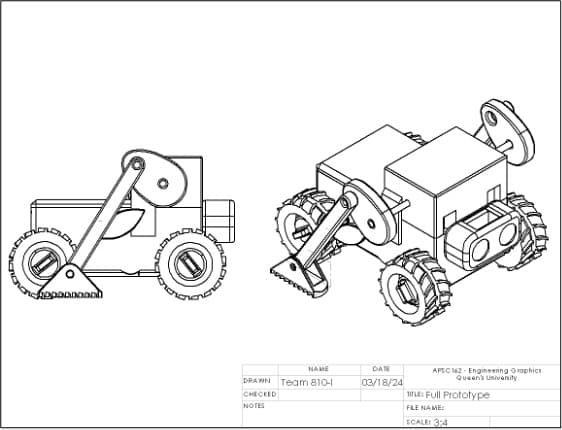
Design
To improve traction, we combined two main systems: enhanced grouser wheels and a bipedal stepping mechanism. The wheels were designed with curved grousers to scoop into soft terrain, inspired by NASA's Perseverance rover. We also added small insertion in the wheel to establish a connection between front and rear wheels, simulating four-wheel drive and improving torque distribution.
To support the wheels, we built a pair of articulated legs powered by a DC motor. These legs step forward to push the rover when it starts to sink or lose grip, and a shelf mechanism lifts them during the return swing to prevent drag. The legs can also be stowed when not in use, making the system efficient and adaptable for various terrain conditions.
Research
We took inspiration from rovers like NASA's Perseverance, which uses curved grouser wheels for grip, and the Apollo Lunar Rover, known for its flexible mesh tires. We also learned from the failure of China's Yutu-1, which got stuck early in its mission due to lunar dust—so dust protection became a priority in our design.
To back our ideas with real physics, we looked into how reduced gravity affects traction and sinkage, based on research by Niksirat and Zou. We used gear ratio and angular velocity equations to control the stepping speed of the legs, and followed NASA's terramechanics guidelines to understand slippage on inclines.
Conclusion
This project was a hands-on dive into lunar mobility challenges, from researching space rovers to building and testing our own prototype, I got to apply engineering principles and physics concepts in a way that felt both practical and exciting.
None of this would've been possible without my team Ruby Sinclair, Hassan Chaudhary, Andrew Jones, Emma Lehman, and Ethan Cairnes